 ... Photos ...
... Photos ...
Agrandir - cliquez ici
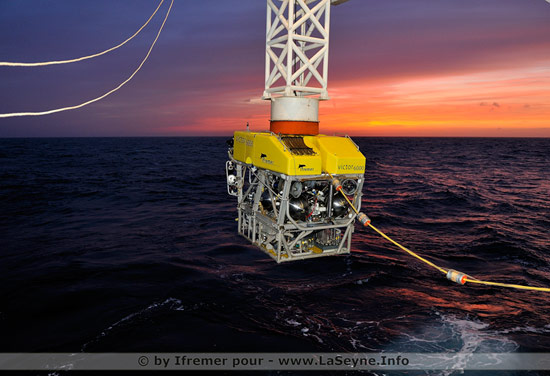
Le robot sous-marin téléopéré Victor 6000
Le ROV Victor 6000 (Remotely Operated Vehicle) est un système téléopéré pouvant descendre jusqu’à 6000 mètres de profondeur, utilisé pour la recherche scientifique dans le domaine de l’océanographie. D'une longueur de 3 mètres, pesant 4 tonnes, il est capable d’effectuer de l’imagerie optique en haute définition, d’emporter et de mettre en oeuvre divers équipements et outillages scientifiques. Relié par un câble électro-porteur de 8 000 mètres de long au navire support, il peut rester en immersion jusqu’à trois jours d’affilé. La partie inférieure de l’engin est constituée d’un module scientifique instrumenté, interchangeable selon la nature de la mission, qui peut accueillir 600kg additionnels d’équipements scientifiques. © Ifremer/Michel Gouillou
Agrandir - cliquez ici
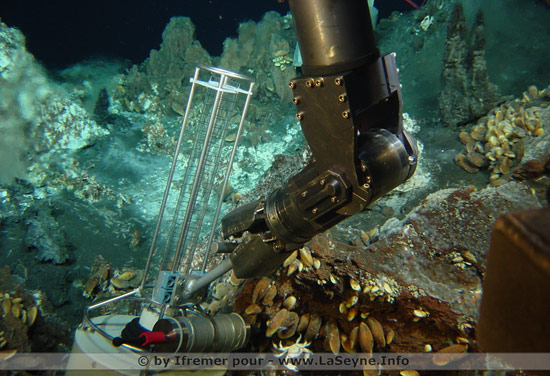
Dépôt d’un débitmètre par le bras robotisé du ROV Victor 6000 (Remotely Operated Vehicle), à proximité d’un champ de modioles sur un site hydrothermal profond
Le robot sous-marin Victor 6000 possède deux bras, un bras de manipulation et un bras de préhension. Le bras télémanipulateur reproduit au fond les mouvements commandés par un pantin « maître » depuis le poste de contrôle. En 2010, l’Ifremer a développé des organes de téléopération « maîtres » ergonomiques et innovants, permettant de piloter les bras avec une efficacité accrue.
Ce principe permet d’avoir une grande dextérité, difficile à obtenir sans homme et sans vision 3D au fond. Grâce aux mouvements « en mode robot » programmés à l’avance pour sortir les outils et les stocker, le bras permet de gagner du temps et d’améliorer la sécurité. © Ifremer-Victor 6000/Campagne Momareto 2006

Agrandir - cliquez ici
Le poste de contrôle du robot sous-marin Victor 6000 : la tour de contrôle
Le ROV Victor 6000 est piloté depuis un container installé sur le navire support. Il peut être opéré depuis les navires océanographiques de l’Ifremer Pourquoi pas ?, L’Atalante ou Thalassa mais aussi étrangers comme le Sarmiento De Gamboa espagnol ou le brise glace Polarstern allemand. Dans cet espace de quelques mètres carrés, les pilotes suivent les directives des scientifiques et conduisent le robot immergé à plusieurs milliers de mètres de profondeur.
La pénombre et la concentration sont de mise dans ce container, aucun écart n'étant permis pour faire avancer un engin de 4 tonnes au fond de l'eau...
Les principaux avantages du ROV par rapport à un engin sous-marin habité, sont d'une part la durée du temps de travail au fond et d'autre part une visibilité collective, interdisciplinaire et en temps réel de la zone d'étude.
Agrandir - cliquez ici
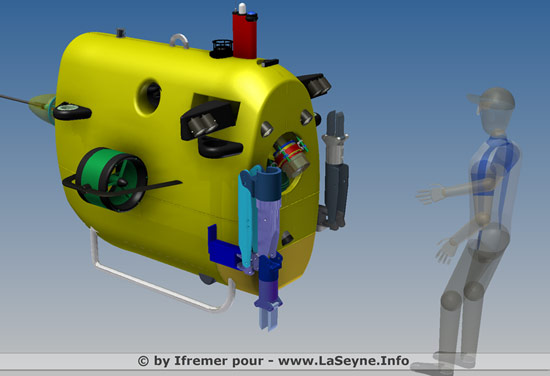
Le H-ROV (Hybrid Remotely Operated Vehicle)
Légende : Le H-ROV, développé au sein du CETSM (Centre Européen de Technologies Sous-Marines), en partenariat avec des industriels européens et avec l'Institut Marum en Allemagne, se présente comme un système hybride nouveau et innovant. Lié par fibre optique à un navire, il offre des capacités d’autonomie originales, et sera, comme le ROV Victor 6000, équipé de bras manipulateurs. Ce robot hybride pourra être mis en œuvre en mode téléopéré ou autonome. Sur la base d’études communes entre les deux organismes, deux engins seront développés simultanément : un engin « Ifremer », de forme lenticulaire et conçu pour des applications jusqu’à 2 500m de profondeur, et une version moins profonde, déployable à partir de navires hauturiers ou brise glace destinée aux mers polaires.
Le concept du H-ROV breveté par l'Ifremer, aura un intérêt entre autres dans le marché de l’offshore pétrolier, pour des interventions légères profondes. Son avantage réside notamment dans son affranchissement d’un navire à positionnement dynamique sophistiqué, très coûteux à la location ou à l’utilisation. © Ifremer












